ZK友好的哈希函数
- zellic
- 发布于 2023-05-31 13:35
- 阅读 2402
本文探讨了ZK-friendly哈希函数的设计原则和性能,详细介绍了几种AOC(算术化导向密码)。文章分析了MiMC、Poseidon、Vision和Rescue等多个哈希函数在SNARK和STARK协议中的效率,强调了在不同上下文中选择合适哈希函数的重要性,同时也提及了新提出的高效哈希函数如Anemoi和Griffin。
引言
哈希函数
一个 加密哈希函数↗ 是密码学的基本原语之一。(在本文中,除非另有说明,否则哈希函数将指代加密哈希函数。)加密哈希函数满足以下三个安全性质:
- 前像抗性:给定哈希值 $h$,找到任何输入消息 $m$ 使得 $f(m) = h$ 是困难的。
- 第二前像抗性:给定输入消息 $m$,找到消息 $m'(\neq m)$ 使得 $f(m') = f(m)$ 是困难的。
- 碰撞抗性:找到任何两个不同的输入消息 $m_1, m_2 (\neq m_1)$ 是困难的,使得 $f(m_1) = f(m_2)$。
加密方案如数字签名、消息认证码、承诺方案和身份验证都建立在哈希函数之上。例如,哈希函数的前像抗性属性使得 工作量证明↗ 系统在加密货币中得以实现。SHA-2 和 SHA-3 是常见的哈希函数示例,它们被用于一般用途。
哈希在 ZK 协议中的使用
哈希函数在 ZK 协议中也非常有用。一个著名的例子是在 Merkle 树中的成员资格检查。对于 Merkle 根 $r$,证明者将声称知晓见证 $w_1,\dots,w_n$,使得
$H(\dots H(H(w_1,w_2),w_3))\dots,w_n) = r$
以证明他们对元素 $w_1$ 的知识,$w_1$ 是 Merkle 树中的成员。我们在之前的文章 “Tornado Cash 是如何工作的?” 中讨论了这种用法。
传统的哈希函数的使用也可以应用于 ZK 协议,例如,利用原生哈希计算进行完整性检查、从固定长度种子获取伪随机字符串,以及签署交易等。
为什么需要 ZK 友好的哈希函数?
标准化的哈希函数如 SHA-2 和 SHA-3 已进行了深入研究,并且其安全性被广泛认为是可靠的。此外,与其竞争对手相比,它们的传统软件和硬件实现的效率也较高。
因此,当我们需要在 ZK 协议中评估哈希时,似乎很好地使用 SHA-2 或 SHA-3。然而,许多 ZK 协议使用相对不太熟悉的哈希函数,如 MiMC↗、Poseidon↗ 和 Rescue↗,而不是 SHA-2 和 SHA-3。
主要原因在于 ZK 协议中的效率是通过与传统度量(如运行时间、功耗和门计数)截然不同的方式来决定的。ZK 协议中电路的效率取决于它们的代数结构。
通常,如果电路可以用大型域中的简单表达式表示,那么它将在证明者执行时间和证明大小上允许高效的证明。不幸的是,传统哈希函数并不适合此情况。
例如,在 zk-STARK 中计算哈希时,SHA-2 比 ZK 友好的哈希函数效率低大约 50–100 倍。这一巨大的性能差距表明了对 ZK 友好哈希函数的需求。
在本文中,我们将介绍在著名会议和期刊中提出的几种 ZK 友好的哈希函数。关注每个哈希函数的设计原理可能会很有趣。
ZK 协议
我们首先讨论 ZK 协议。在试图充分理解协议的基础上,我们将重点关注它们的高层特征以及确定效率的指标。
zk-SNARK
zk-SNARK 是一个缩写,代表 零知识简洁 非交互式知识证明。
- 零知识:验证者获取的信息仅限于声明是真的。
- 简洁:证明大小和验证者时间是 亚线性 的。
- 非交互式:证明者和验证者之间没有任何交互。
- 知识证明:不仅证明输入 $x$ 存在,还证明证明者知道 $x$。
虽然存在几种方式来构建满足上述特征的协议,如 线性 PCP + 配对加密↗、常数回合多项式 IOP↗ 和 多项式承诺方案 + IOP 基础↗,但基于线性 PCP 和配对加密的 Groth16↗ 是最广泛使用的协议。
Groth16 和许多其他零知识证明系统,如 Aurora↗、Ligero↗ 和 Bulletproofs↗ 都是在 Rank-1 Constraint System (R1CS) 形式下评估电路的。
R1CS 示例
R1CS 是一个方程系统,其中每个方程由一个三元组 $(\vec{a}_i,\vec{b}_i,\vec{c}_i)$ 定义,使得 $(\vec{a}_i \cdot \vec{s}) \times (\vec{b}_i \cdot \vec{s}) = (\vec{c}_i \cdot \vec{s})$。
例如,$y = x^3$ 是由三元组(中间值 $z = x^2$)定义的两个方程:
$x \times x = z : \left( \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix} \cdot \begin{pmatrix} x \\ y \\ z \end{pmatrix} \right) \times \left( \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix} \cdot \begin{pmatrix} x \\ y \\ z \end{pmatrix} \right) = \left( \begin{pmatrix} 0 \\ 0 \\ 1 \end{pmatrix} \cdot \begin{pmatrix} x \\ y \\ z \end{pmatrix} \right)$,
$z \times x = y : \left( \begin{pmatrix} 0 \\ 0 \\ 1 \end{pmatrix} \cdot \begin{pmatrix} x \\ y \\ z \end{pmatrix} \right) \times \left( \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix} \cdot \begin{pmatrix} x \\ y \\ z \end{pmatrix} \right) = \left( \begin{pmatrix} 0 \\ 1 \\ 0 \end{pmatrix} \cdot \begin{pmatrix} x \\ y \\ z \end{pmatrix} \right)$
在 SNARK 设置中,成本由 R1CS 中的约束数量决定。例如,$x^\alpha$ 对于常数 $\alpha$ 需要约 $\lceil \log_2(\alpha) \rceil$ 的约束。
zk-STARK
zk-STARK 是一个缩写,代表 零知识可扩展 透明知识证明。
- 零知识:验证者获取的信息仅限于声明是真的。
- 可扩展:证明者的时间是 准线性的;证明大小和验证者时间是 亚线性 的。
- 透明:不需要可信的设置。
- 知识证明:不仅是输入 $x$ 存在,还有证明者知道 $x$。
任何满足上述条件的协议称为 zk-STARK。然而,zk-STARK 通常指的是在 论文↗ 中首次提出的协议。我们在本文中也将该论文中的协议称为 zk-STARK。
为了在 STARK 环境中评估电路,该电路应转化为 代数中间表示 (AIR)。
AIR 示例
我们给出计算 Fibonacci 序列的一个示例。Fibonacci 序列定义为 $a_0 = 1, a_1 = 1$,且 $ai = a{i-1} + a_{i-2} \text{ for } i \geq 2$。
证明者希望证明 $a_{7} = 21$。然后,一个 代数执行轨迹 (AET),即 Fibonacci 序列计算的执行轨迹为:
| a |
|---|
| 1 |
| 1 |
| 2 |
| 3 |
| 5 |
| 8 |
| 13 |
| 21 |
而在多项式形式中描述的 AIR 约束有:
- $a_0 - 1 = 0$,
- $a_1 - 1 = 0$,
- $a{i} - a{i-1} - a_{i-2} = 0 \text{ for } 2 \leq i \leq 7$,
- $a_7 = 21$.
设 $t$ 为行数,$w$ 为 AET 中的列数。那么 AET 的大小为 $t \cdot w$。此外,设 $d$ 为 AIR 约束的最大度数。在我们的例子中,$t = 8, w = 1, d = 1$。ZK-STARK 的效率由 $t, w, d$ 决定。对于每个电路,通过测量 $t \cdot w \cdot d$ 来比较效率。
ZK 友好的哈希函数
大致来说,给定电路的代数表示越简单,对于 R1CS 和 AIR 表示的效率越高。因此,加密学家开始设计既在代数上简单又安全的结构。我们通常将这些密码称为 面向算术的密码 (AOCs)。
对于 AOCs,大多数传统的对称密钥密码分析(如差分分析和线性分析)通常相关性较弱。对于 AOCs 最强大的攻击类型是代数攻击,例如 Gröbner 基、线性化、GCD 和插值攻击。一旦设计者决定了他们密码的设计,回合数就会被选择得足够安全以抵御这些攻击。
另一方面,这个领域相对较新,并且出现了有趣的攻击(见 示例一个↗、 示例二↗、 示例三↗ 和 示例四↗),这些攻击常常导致密码破坏或参数修改,不过我们将在下一篇文章中讨论这些内容。
让我们看一下不同 AOCs 的设计原理。
MiMC
MiMC↗ 是第一个 ZK 友好的哈希函数,首次在 ASIACRYPT 2016 中提出。尽管在 MiMC 之后提出了更有效的 ZK 友好哈希函数,但 MiMC 在许多应用中仍然被广泛使用,因为与其他 ZK 友好哈希函数相比,它被认为是成熟的。
MiMC 的设计极其简单:函数 $F(x) := x^3$ 与子密钥加法迭代进行。这一概念已在 1990 年代由 Nyberg 和 Knudsen 提出,称为 KN-Cipher↗。
MiMC-n/n
我们首先看一下一个块密码。块密码通过迭代 $r$ 轮构造,其中每轮函数描述为 $F_i(x) = (x + k + c_i)^3$。在轮函数中,$c_i$ 是一个轮常数,$k$ 是一个密钥,字段为 $\mathbb F_q$,其中 $q$ 是一个大素数或 $q = 2^n$。加密过程定义为
$Ek(x) = (F{r-1} \circ F_{r-2} \circ \dots \circ F_0)(x) + k$。
并且 $c_0$ 固定为 $0$,因为 $c_0$ 不影响安全性。(如果你有兴趣,我建议你自己查阅!)
对于域 $\mathbb F_q$,$F(x) = x^3$ 的逆只有当且仅当 $\gcd(3, q-1) = 1$。为此,作者建议选择奇数 $n$ 对于 $q = 2^n$ 和 $q = 3k+2$ 的质数 $q$。
轮常数 $c_i$ 在论文中并未具体说明,但推荐将其初始随机选择然后硬编码到实现中。为了展示在轮常数上 没有藏私↗,常常选取从某些消息的 SHA-2(或任何其他安全哈希函数)摘要生成,如 MiMC0、MiMC1,$\dots$。
轮数决定为 $r = \lceil \log3 q \rceil$。例如,对于域 $\mathbb F{2^{127}}$,轮数 $r = \lceil \log_3 (2^{127}) \rceil = 81$。关于此的原因我们稍后会讨论。
 |
|---|
| $r$ 轮的 MiMC-n/nn/nn/n。图片来自 MiMC 论文。 |
MiMC-2n/n
使用相同的非线性置换在 Feistel 网络中构造块密码也是可能的。MiMC-2n/n2n/n2n/n 的轮函数在下面图示中描述,可以定义为:
$x_L | x_R \leftarrow x_R + (x_L + k + c_i)^3 | x_L$。
|
|---|
| MiMC-2n/n2n/n2n/n 轮函数。图片来自 这里↗。 |
对于每个轮,只改变一半的数据;因此,Feistel 版本的轮数是 $2 \cdot \lceil \log_3 q \rceil$,相对于 MiMC-n/nn/nn/n 的轮数翻倍。
哈希函数
当密钥固定为 $0$ 时,块密码变成一个置换。给定一个置换,有一个著名的构造方法可以从置换导出哈希函数,称为 海绵框架↗,该构造方法已被证明是安全的,并且在许多其他哈希函数中使用,包括 SHA-3↗。
| 海绵构造。$P_i$ 是输入;$Z_i$ 是哈希输出。未使用的 容量 $c$ 应为所需碰撞或前像攻击的两倍。图片来自 维基百科↗。 |
海绵构造由名为 吸收 和 挤压 的两个阶段组成。在吸收阶段,输入数据被吸收到海绵中。之后,结果被挤出来。
MiMC 的哈希函数同样基于海绵框架。在吸收阶段,消息块添加到状态的一个子集中,然后使用某个置换函数 $f$(在我们的情况中,是 MiMC 置换)整体进行转换。请注意,在本文中介绍的所有其他 ZK 友好的哈希函数也都是基于海绵框架的。
安全分析
虽然论文中考虑了插值攻击、GCD 攻击、不变子场攻击、差分密码分析和线性密码分析,但我们仅在这里介绍插值攻击,它提供了轮数的下限。插值攻击在没有了解密钥的情况下构造对应于加密函数的多项式。如果对手能够构造出这样的多项式,那么对于任何给定的明文,都可以在不知道密钥的情况下生成对应的密文。
设 $E_k$ 是一个关于输入 $x$ 的加密函数,度数为 $d$。那么通过 $d+1$ 个明文-密文对,$E_k(x)$ 可以根据拉格朗日定理构造,并且构造拉格朗日插值多项式的复杂度为 $O(d \log d)$。在我们的案例中,度数 $d = 3^r$。通过选择 $r = \lceil \log_3 q \rceil$,度数 $d$ 达到 $q - 1$ 并且攻击变得不可行。
SNARK 复杂度
由于单个约束可以平方值,因此在每轮 MiMC 置换中有两个 R1CS 约束:
x2 = x*x
x3 = x2*x
为了生成一个 256 位输出哈希(输入为 256 位 $x$),使用海绵构造。具体地,计算 $(x,0)$ 的 MiMC-2n/n2n/n2n/n,然后剩下的 256 位是哈希值。轮数选择为 $2 \cdot \lceil \log3(2^{256}) \rceil = 324$。然后约束的数量为 $324 \times 2 = 628$。注意该领域应选择 $\gcd(3, q-1) = 1$,这意味着 $\mathbb F{2^{256}}$ 不应被选择。
STARK 复杂度
在 AIR 表示中,对于 MiMC-2n/n2n/n2n/n,每行有两个变量,$x_L$ 和 $x_R$。我们在第 $i$ 行中表示 $x_L, x_R$ 为 $x^{(i)}_L, x^{(i)}_R$。则根据轮函数 $x_L | x_R \leftarrow x_R + (x_L + k + c_i)^3 | x_L$,约束多项式被定义为:
- $x^{(i+1)}_L = x^{(i)}_R + (x^{(i)}_L + k + c_i)^3$,
- $x^{(i+1)}_R = x^{(i)}_L$。
那么行数 $t = 324$,列数 $w = 2$,最大度数 $d = 3$。效率指标为 $t \cdot w \cdot d = 1944$。
实现
尽管作者建议使用 $x^3$ 作为 S-box,但该 S-box 通常被替换为其他 S-box,如 $x^5, x^7$ 如果 $\gcd(3, q-1) = 1$。例如,BN254↗ 字段是 $\mathbb F_q$,对于 254 位素数 $q$,$\gcd(3, q-1) \neq 1$。因此,在 BN254 上使用 MiMC 时,最好使用 $x^5$ 或 $x^7$,而不是 $x^3$ ( 示例 1↗,示例 2↗)。在这种情况下,轮数确定为 $\log_5 q$ 或 $\log_7 q$,这减轻了目前为止提出的所有攻击。
对于轮常数,作者没有在论文中具体说明如何生成。因此,每个实现将通过计算类似 MiMC0 和 MiMC1 的字符串的哈希值来确定轮常数,使用 SHA-2↗ 或 SHA-3↗。如果某人创建了自己的 MiMC 实现,而没有披露如何生成轮常数,那么可能会存在潜在的漏洞,例如容易受到不变子场攻击。
Poseidon
Poseidon↗ 是另一个在 USENIX 2021 中提出的 ZK 友好的哈希函数。Poseidon 基于 HADES↗ 设计策略,这是对 置换-置换网络 (SPN)↗ 的概括,建议在 EUROCRYPT 2020 中使用。
HADES 设计策略
SPN 是一个著名的块密码算法。例如, AES↗ 使用 SPN 结构。通过足够交替回合的置换盒和置换盒,攻击者无法从明文-密文对中恢复密钥。
HADES 由三个步骤构成: 添加轮密钥、子字 和 混合层。
这似乎与 SPN 有相同的方法,但现有 SPN 与 HADES 的主要区别在于,HADES 中的部分 S-box 层是部分 S-box 层,这意味着单个 S-box 应用于最右边的元素,其他的保持不变。作者认为,这将降低 R1CS 或 AET 成本。
Poseidon 哈希函数
Poseidon 哈希函数的构造遵循 HADES,添加轮密钥 被替换为 添加轮常量。Poseidon 仅考虑素数域 $\mathbb F_p$。设 $m$ 为每层中的字的数量(为避免与 STARK 中的行数 $t$ 混淆,我们使用 $m$ 而不是 $t$,代替论文中的符号)。下面是图形概览。
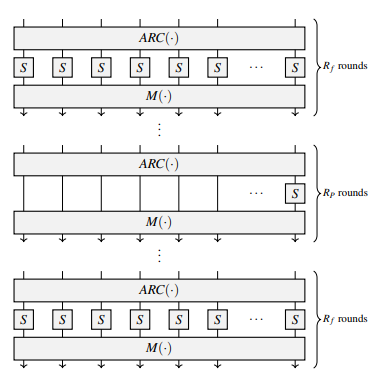 |
|---|
| Poseidon 的构造。$R_F = 2 \cdot R_f$ 是完整 S-box 轮的数量,$R_P$ 是部分 S-box 轮的数量。图片来自 Poseidon 论文。 |
S-box 定义为 $\text{S-box}(x) = x^\alpha$,其中 $\alpha \geq 3$ 是满足 $\gcd(\alpha, p-1) = 1$ 的最小正整数。
线性层的目的是将局部变化传播到整个状态,因此通常选择线性层为 MDS 矩阵↗,其效果在成本上可以忽略不计。在 Poseidon 中,线性层是一个 Cauchy 矩阵↗,其定义为 $M[i,j] = \frac{1}{x_i + y_j}$,其中 $x_i$ 和 $y_j$ 彼此不同并且 $x_i + y_j \neq 0$,且 $i \in {1, \dots, m}$,$j \in {1, \dots, m}$。这是 Poseidon 中的一个原创建议;然而,如果存在不变子空间路径,则某些 Cauchy 矩阵不安全。我们省略该攻击的细节。感兴趣的读者可以参考 论文↗。因此,线性层应仔细选择以避免这种类型的攻击。 该结构高度可参数化,且对于 256 位输出哈希的建议参数为 $m=3, R_F=8, R_P=57$,其中 $\alpha=5$,且 $p$ 约为 256 位。$R_F=8$ 被选择以防止统计攻击,$R_P=57$ 被选择以防止代数攻击。
SNARK 复杂度
对于 $\alpha=5$,S-box $x^\alpha$ 用三个约束表示:
x2 = x*x
x4 = x2*x2
x5 = x4*x
总 S-box 数量为 $m \cdot R_F + R_P$。因此,对于 $\alpha=5$,总约束数量为 $3 \cdot (m \cdot R_F + R_P)$。对于 $m=3, R_F=8, R_P=57$,约需要 276 个 R1CS 约束。
STARK 复杂度
如果我们在每个轮中保持 $m$ 个变量,则行数为 $t=R_F+R_P$,列数为 $w=k$,最大度数为 $d=\alpha$。然后效率指标为 $t \cdot w \cdot d = (R_F + R_P) \cdot m \cdot \alpha$。然而,这种 AET 表示未能利用部分 S-box 轮。相反,通过将每个 S-box 输出视为变量,行数为 $t=1$,列数为 $w = m \cdot R_F + R_P$,而最大度数 $d$ 仍为 $\alpha$。对于 $m=3, R_F=8, R_P=57$,效率指标为 $t \cdot w \cdot d = 1 \cdot 81 \cdot 5 = 425$。
Vision / Rescue
Vision / Rescue↗ 是遵循卓越设计策略的 ZK 友好哈希函数。它们在 FSE 2020 中提出。
卓越设计策略
卓越设计是一种由元组 $(q, m, \pi, M, v, s)$ 参数化的置换-置换网络:
- $q$ : 字段为 $\mathbb F_q$,其中 $q$ 要么是 $2$ 的幂,要么是素数,
- $m$ : 状态为 $\mathbb F_q$ 中的 $m$ 个元素,
- $\pi = (\pi_0, \pi_1)$ : S-box,
- $M$ : 一个 MDS 矩阵↗,
- $v$ : 第一步常数,
- $s$ : 所需的安全级别。在每一轮的 Marvelous 设计中,一对 S-box $(\pi_0, \pi_1)$ 交替使用。$\pi_0$ 和 $\pi_1$ 之间的区别在于它们的度数。对于一个,$\pi_0$ 在顺向评价时应该选择一个高的度数,而在逆向评价时选择一个低的度数。另一个 S-box,即 $\pi_1$,则选择相反的目标,这意味着它在顺向方向上的度数较低,在逆向方向上的度数较高。这样的选择带来了三个好处:
- 无论对手试图以哪个方向攻击,度数都保证是高的。
- 加密和解密函数的成本相同。
- 由于非程序性计算,每个 S-box 的低度表示可以高效地评估。
对于 Vision / Rescue,$\pi_0$ 直接从 $\pi_1$ 获得:$\pi_0 = \pi_1^{-1}$。
线性层通过 Vandermonde\ matrix↗ 选择。如同在 Poseidon 中所描述的,没有关于 Vandermonde 矩阵的安全声明,任何其它的 MDS 矩阵都应该没问题。
与其他算法的一个有趣区别是 Marvelous 使用了一个复杂的密钥调度。在 MiMC 和 HADES 中,没有特别的密钥调度,主密钥每轮都被添加。然而,在 Marvelous 中,密钥调度重用了轮函数。作者声称这是一个安全边际,因为 AOCs 的领域相对较新。需要注意的是,复杂的调度不影响固定密钥置换的哈希函数效率,因为每个子密钥都是在离线阶段派生的。
Vision
Vision 意在于其本地域 $\mathbb F_{2^n}$ 上操作。为了构造 S-box,我们选择度数 $4$,表示为 $B$。更准确地,我们在 $B(x)$ 中没有 $x^3$ 项:$B(x) = b_4 \cdot x^4 + b_2 \cdot x^2 + b_1 \cdot x^1 + b_0$。然后在 $\mathbb F_2$ 上线性化 $B$,这对其他计算设置如 MPC↗ 有好处。然而,它与 SNARK/STARK 设置无关,因此我们不再进一步讨论。
选择 $B$ 后,$\pi_0$ 和 $\pi_1$ 分别为:$\pi_0(x) = B^{-1}(x^{-1})$ 和 $\pi_1(x) = B(x^{-1})$。
最后,为了应对最远攻击,轮数翻倍,这意味着增加 100% 的安全边际,轮数从 10 变为 16。
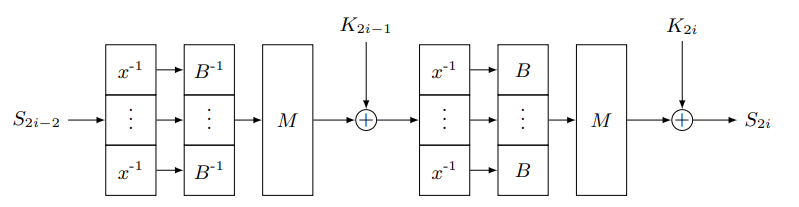 |
|---|
| Vision 的单轮(两步)。图片来自 Marvelous 论文。 |
Rescue
在 Marvelous 领域中的第二个算法家族是 Rescue。为了构建 S-box,应该找到最小的素数 $\alpha$,使得 $\gcd(\alpha, q-1) = 1$。然后 S-box 被设置为 $\pi_0(x) = x^{1/\alpha}$ 和 $\pi_1(x) = x^\alpha$。轮数被翻倍以应对最远攻击,如同 Vision,并且轮数在 10 到 22 之间变化。
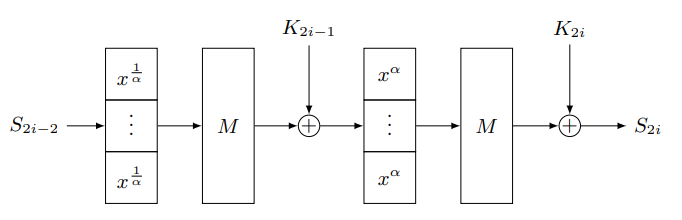 |
|---|
| Rescue 的单轮(两步)。图片来自 Marvelous 论文。 |
SNARK 复杂度
对于 Vision,我们应考虑反向映射 $x^{-1}$ 和 $B(x)$ — $B^{-1}(x)$ 与 $B(x)$ 类似。首先,对 $x^{-1}$,设 $y = x^{-1}$。如果 $x = 0$,则 $y = 0$;如果 $x \neq 0$,则 $xy = 1$。将其结合,我们得到必要且充分条件 $x(1+xy) = 0$ 和 $y(1+xy) = 0$。它由三个约束表示:
z = x*y
eq1 = x*(1+z)
eq2 = y*(1+z)
其次,对于 $B$,由于其度数为 $4$,它由两个约束表示:
x2 = x*x
x4 = x2*x2
注意,只有 $x^4$ 和 $x^2$ 被评估,而 $B(x) = b_4 \cdot x^4 + b_2 \cdot x^2 + b_1 \cdot x^1 + b_0$ 尚未推导。不过,这并不重要,因为 R1CS 的结构允许我们稍后乘以常量并加上变量。
单轮由两个步骤组成,每一步添加的约束为 $3m + 2m = 5m$。因此,总约束的数量为 $10 \cdot m \cdot r$,轮次为 $r$。从推荐参数 $q \approx 2^{256}, m = 3, r = 12$,约束的数量为 $10 \times 3 \times 12 = 360$。
对于 Rescue,只有 $B(x) = x^\alpha$ 和 $B(x) = x^{1/\alpha}$ 是非线性操作,对于 $\alpha = 3$,每个 $B(x)$ 和 $B^{-1}(x)$ 需要两个约束,正如我们在 MiMC 中看到的。因此,每一轮添加 $4m$ 约束,总约束数量为 $4 \cdot m \cdot r$,对于轮距离 $r$。从推荐参数 $q \approx 2^{256}, m = 3, r = 22$,于是约束数量为 $4 \times 3 \times 22 = 264$。
STARK 复杂度
对于 Vision,作者提出一个 AIR,$w = 2m, t = 2, d = 2$,用于每一步。前 $m$ 个元素对应于原始状态(如 S[i]),最后 $m$ 个元素是存储的辅助值(如 R[i])。在第一个周期中,$R[i] = 1$ 当 $S[i] = 0$ 时,其他情况下 $R[i] = 0$。我们将 $S[i]$ 的值对应于下一行标记为 $S'[i]$。我们的目标是使 $S'[i] = S[i]^{-1}$。然后通过设置以下约束,验证 $R[i]$ 和 $S'[i]$ 的值是正确的。
- $S[i] \cdot S'[i] - R[i] = 0$,
- $S[i] \cdot (1 - R[i]) = 0$,
- $S'[i] \cdot (1 - R[i]) = 0$。
对于第二个周期,$R[i] = S[i]^2$。然后 $S'[i] = B(S[i])$,$R[i]$ 通过以下约束验证:
- $R[i] - S[i]^2 = 0$,
- $S'[i] - b_4 \cdot R[i]^2 - b_2 \cdot R[i] - b_1 \cdot S[i] - b_0 = 0$。
当轮数为 $r$ 时,$w = 2m, t = 4r, d = 2$。从推荐参数 $q \approx 2^{256}, m = 3, r = 12$,效率指标为 $t \cdot w \cdot d = 48 \cdot 6 \cdot 2 = 576$。
对于 Rescue,不需要辅助值。此外,可以将 $B(x)$ 和 $B^{-1}(x)$ 合并为一个方程。因此,对于 $r$ 轮,$w = m, t = r, d = 3$。从推荐参数 $q \approx 2^{256}, m = 3, r = 22$,效率指标为 $t \cdot w \cdot d = 22 \cdot 3 \cdot 3 = 198$。
结论
在本文中,我们讨论了各种 AOC 的设计原理和性能。还有更多未提及的 AOC,如 GMiMC、Jarvis 和 Friday,但它们的设计原理与我们所涵盖的原则类似。
整体的 SNARK 和 STARK 性能如下所示。
| AOC | R1CS(SNARK) | AET(STARK) |
|---|---|---|
| MiMC | 628 | 1944 |
| Poseidon | 276 | 425 |
| Vision | 360 | 576 |
| Rescue | 264 | 198 |
如表格所示,Rescue 在 SNARK 和 STARK 中均具有竞争力的结果。事实上,STARKWARE 也在其自己的 调查↗ 中推荐了 Rescue 作为 STARK 友好的哈希函数。
近年来,提出了在 SNARK 设置下比 Rescue 效率提高 2-3 倍的哈希函数:Anemoi↗ 和 Griffin↗。它们尚未完全通过同行评审,需要通过学术界和业界的验证,但其卓越的性能意味着一旦成熟,便可考虑使用。
同时,AOC 的代数简单性往往允许攻击者攻击密码算法。因此,建议使用发布并历经时间验证可靠的密码算法,而不是仅仅基于效率来选择。在下一篇文章中,我们将讨论对 AOC 的代数攻击。
- 原文链接: zellic.io/blog/zk-friend...
- 登链社区 AI 助手,为大家转译优秀英文文章,如有翻译不通的地方,还请包涵~





